

一、系統電氣原理圖
本項目中以運動控制卡為控制核心,配合邁克彼恩LS伺服驅動系統部件,設計出了凹版印刷機干燥箱快速檢測平臺控制系統的電氣原理圖。
二、控制電源
本次設計中,邁克彼恩LS伺服驅動系統采用三相220V電源。對于其它低壓電氣元件,將通過開關電源轉化為直流24V對其供電。為此,系統設置一個總開關,控制系統的總電源;由于國內三相電壓為380V交流電源,因此需要加一個交流變壓器把電壓轉換為三相220V交流電;再分設一個交流電源控制開關與一個直流電源控制開關。控制電源方面采用一個常閉按鈕、一個常開按鈕和交流接觸器組合,可方便的實現電路的通斷,開關的極數對應各伺服的需要。
三、運動控制卡電氣接口設計
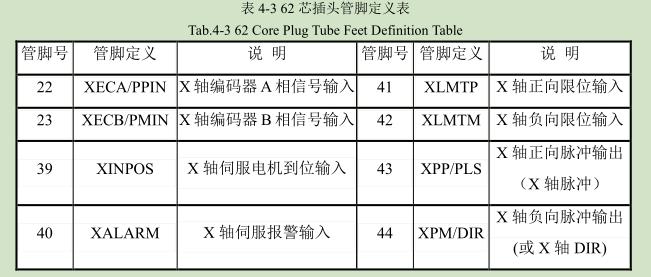
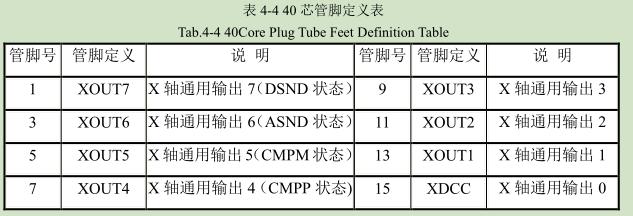
根據項目中運動控制卡的控制功能,對運動控制卡與各伺服電氣接口以及運動控制卡與各伺服驅動脈沖串輸入接口進行了設計。所選用阿爾泰USB1020運動控制卡在工作過程中,結合其通用輸入、輸出特性,以及本項目的應用特點對運動控制卡62芯插頭及40芯D型插頭管腳進行了定義,以X軸為例進行了設置,Y、Z、R軸的設置同X軸,X軸管腳定義具體設置如下表所示:
四、伺服電氣接口設計
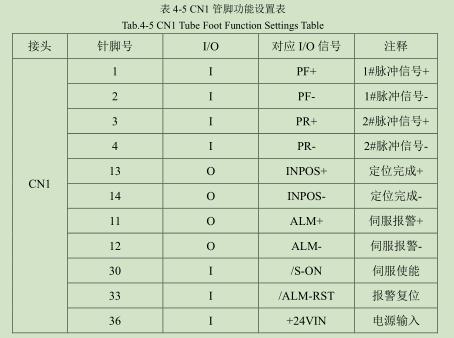
測試平臺設計中使用伺服系統來實現準確定位,因此伺服系統采用位置控制模式的接線方法。在此模式下邁克彼恩LS伺服需設置三個外部接口,其中CN1專門用于上級控制信號的輸入及輸出;CN2用于編碼器信號的輸入;CN3用于與上級通信機進行通信。CN1端口設有脈沖串輸入、脈沖方向符號、定位完成、伺服開啟、伺服報警等,用來控制伺服系統的運動。伺服驅動使用外部直流24V電源。把伺服參數PE-601設置為2,使得伺服系統進入位置模式進行定位運轉,同時相應針腳功能的設置如下表所示。
五、伺服系統的參數設置
對伺服系統的接線原理及控制功能了解后,定位精度還不能很好保證,需要對伺服參數進行設置以實現驅動與電機更好的定位匹配。以X軸伺服為例具體參數設置如下表4-6:
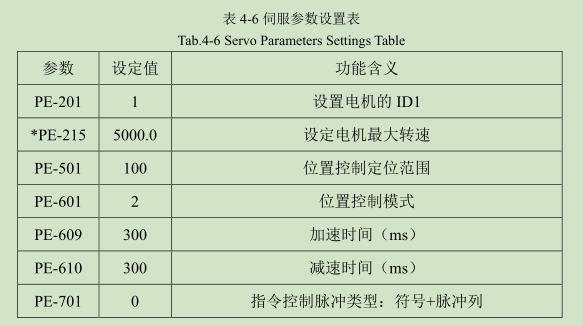
參數設置說明:
(1)由于測試平臺是多電機控制模式,設置電機的ID是為了能很好的對各電機進行指令脈沖控制。假設X電機為1號電機進行參數設定示例。
(2)為了防止電機在測試過程中轉速超過設定值太多,可以通過此參數來設定。
(3)定位范圍是用來設定輸出定位完畢信號的范圍。偏差計數器中滯留的脈沖數若小于定位完畢范圍設定值,則INP-SG將導通,此時輸出定位完成信號。若定位范圍的設定比較大,并且伺服系統運行速度較低,此時可能一直處于導通的狀態。為了使系統按照設計的時序圖工作,同時保證運行的可靠,需設定定位范圍PE-501的值,初步設置為100。
(4)平臺主要是實現準確定位的,故把PE-601伺服系統設置為位置控制模式;
(5)通過加減速時間設定可以控制平臺運行中的穩定性。
(6)用符號和脈沖串形式來控制伺服電機的正反轉,把運動控制卡高速脈沖輸出口和PP連接來控制伺服電機的轉速和轉動角度;通過控制NP端口的電平來制電機轉動的方向。
六、數據采集卡接口設計
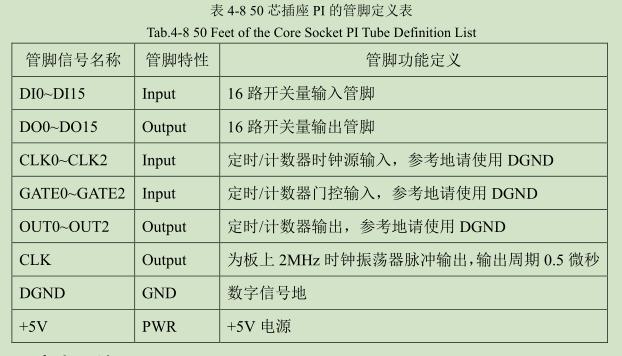
數據采集卡USB2817為16單通道或者8雙通道的數據采集卡,本課題項目中風溫、風速模擬信號只需要占用兩個模擬量輸入通道,為了便于接線及后續擴展,對37芯D型插座CN1的管腳及50芯插座PI的管腳具體定義如下表4-7和4-8:http://www.gzpengjie880.cn

 粵公網安備 44190002002768號
粵公網安備 44190002002768號